
参数化建模-行程范围驱动(SolidEdge版本)
作者:Austin
经常有客户提到行程类的产品,类似气缸,模组,升降机等。同一个系列, 不同的规格,对应的行程范围是不一样的。但是SE的范围配合,对应的范围的最小值和最大值,只能输入固定不变的,不能用变量来驱动,每次3D模型生成出来后,还需要手动修改行程范围。佳鱼参数化能不能做到自动?
答案是可以的,接下来就介绍一种取巧的做法,以模组为例。
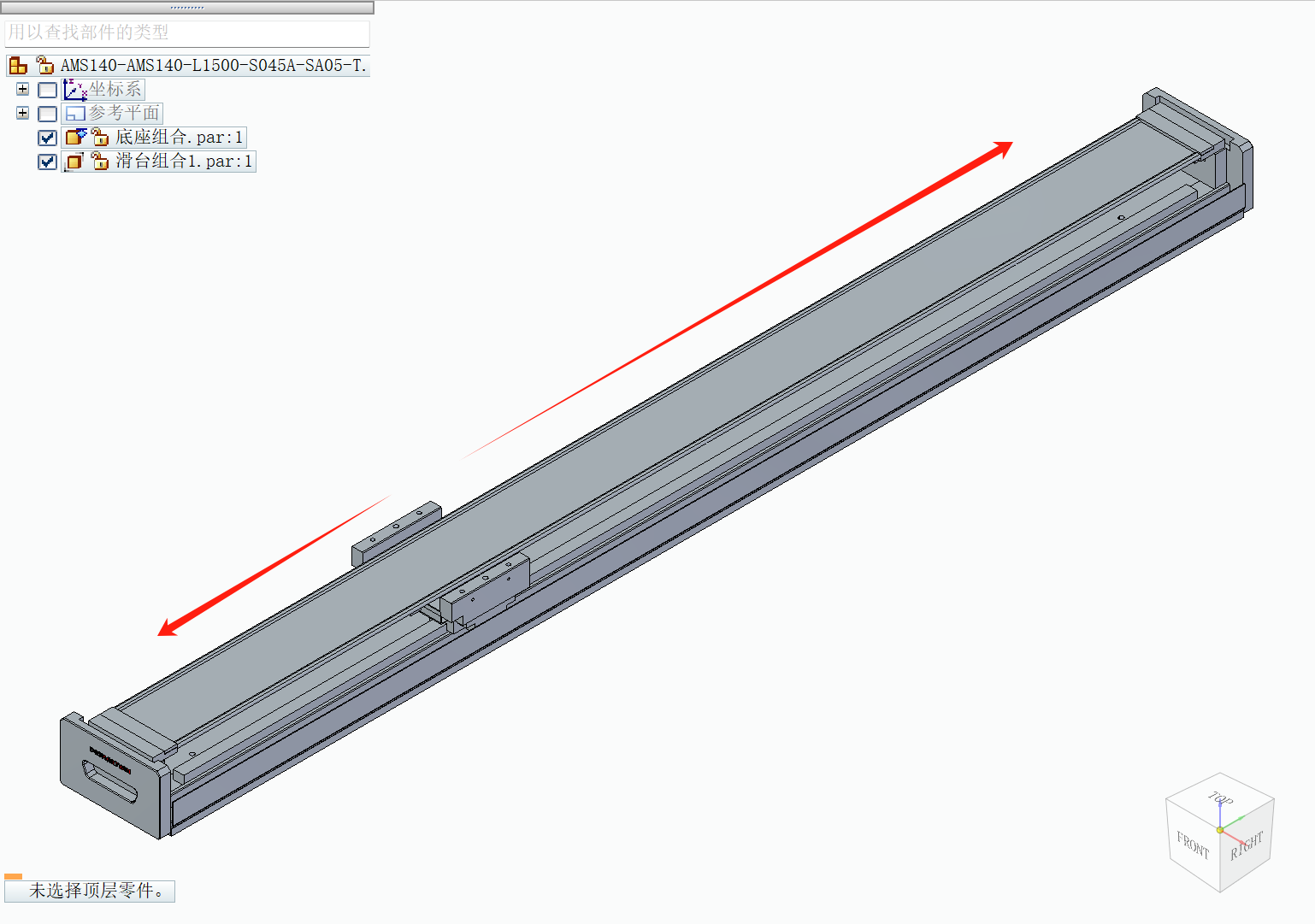
1,比如以下模组,滑台在模组上是需要运动,不同的行程的模组,滑台运动的起始点和终点位置可能都不一样。单一的范围配合没办法满足。那如何来实现呢?
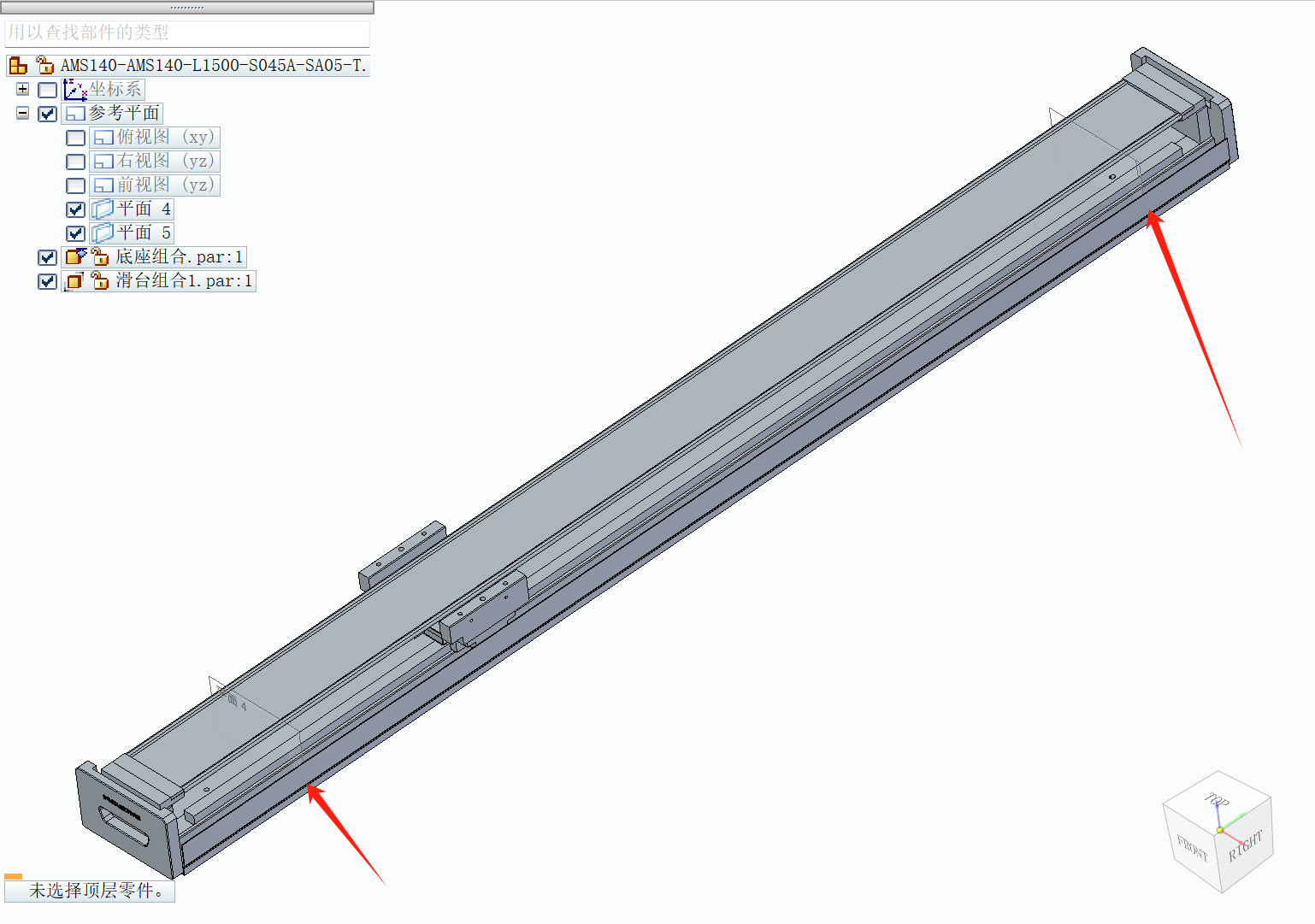
2,首先基于两侧端面,分别创建2个平面,作为滑台运动的起始位置,和终点位置。这两个平面到端面的距离,是可以作为变量来控制,根据不同的行程取对应的距离值。
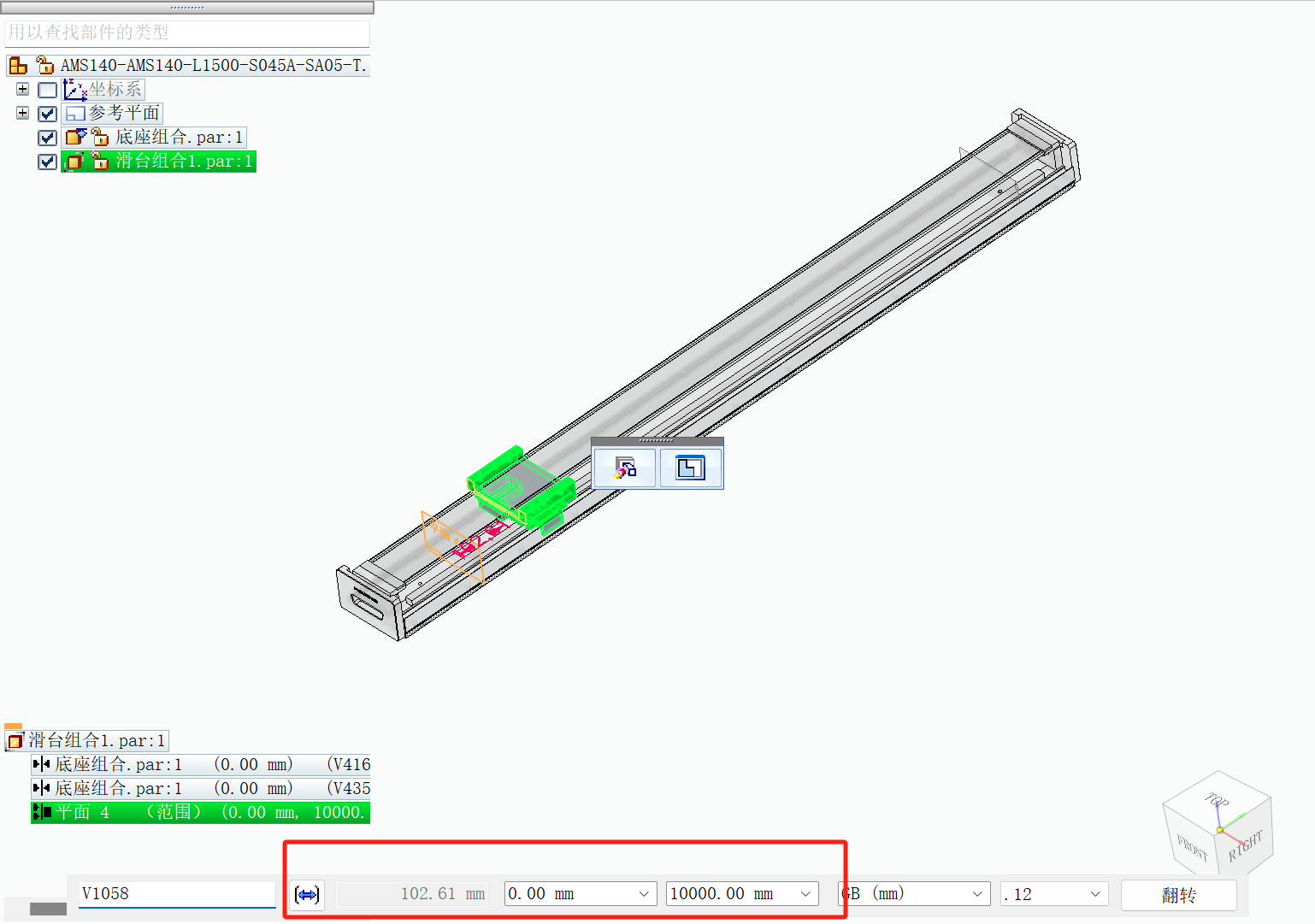
3,将滑台的左端面与起始位置平面,做范围配合。范围的最小值为0,也就是刚好起始位置;最大值给无穷大,当然这里没有办法设置无穷大,所以给一个尽量大的值,只要能大于这个系列最大行程的就可以。这样就控制滑台只能从起始点无限往右运动。
4,同样的方法,将滑台的右端面与终点平面,做范围配合。范围的最小值为0,也就是刚好终点位置;最大值给无穷大,当然这里没有办法设置无穷大,所以给一个尽量大的值,只要能大于这个系列最大行程的就可以。这样就控制滑台只能从终点无限往左运动。
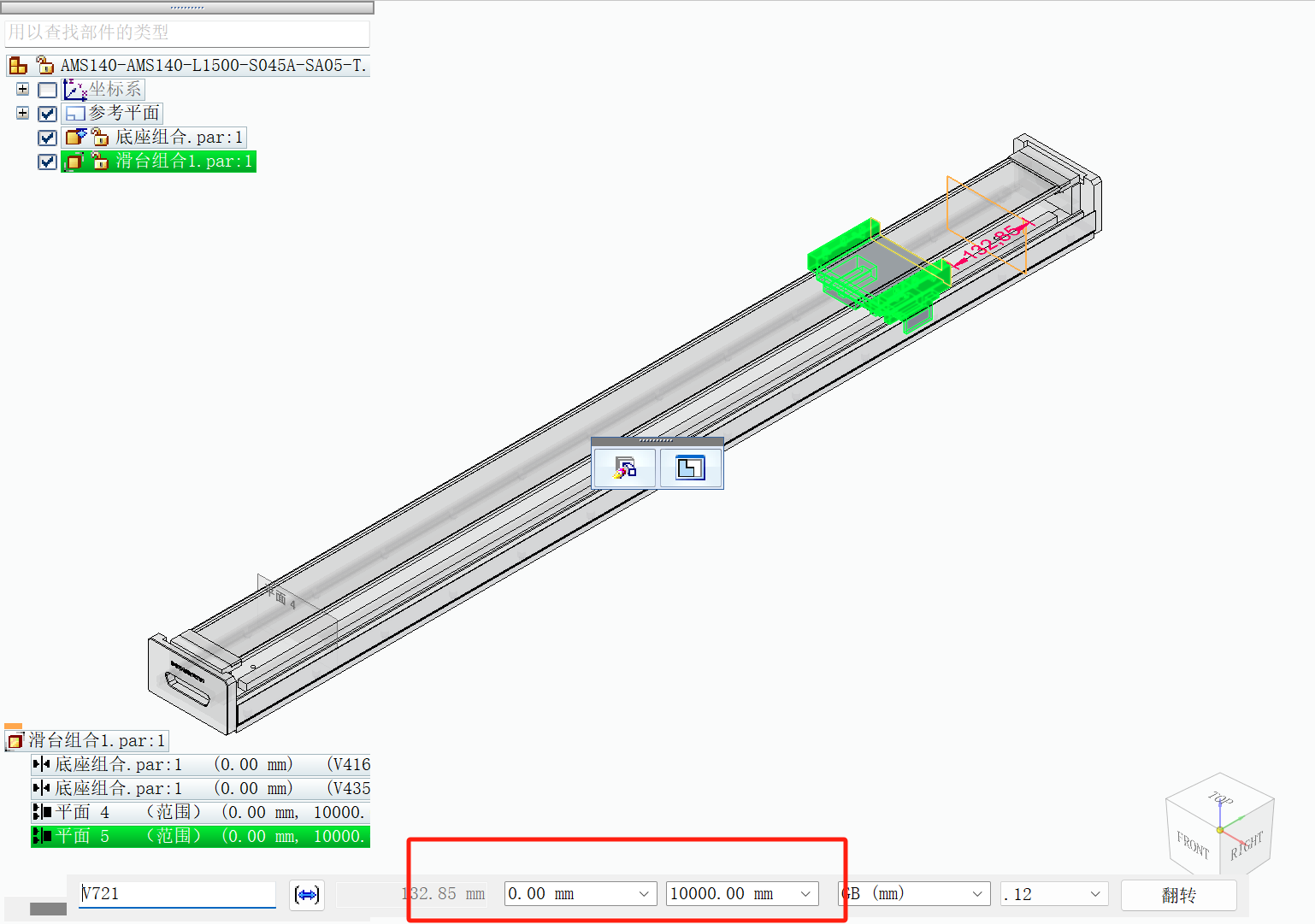
5,第3步和第4步范围叠加,就实现了滑台只能起始点到终点的运动。而且起始点平面和终点平面是可以用参数化来驱动距离,相当于控制了行程范围。